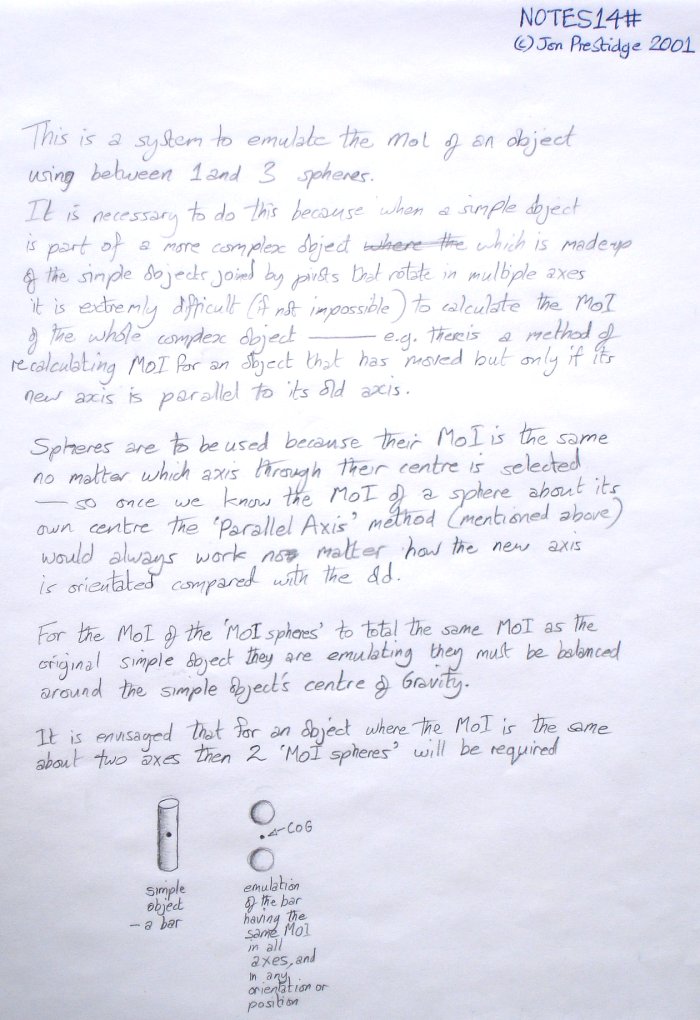
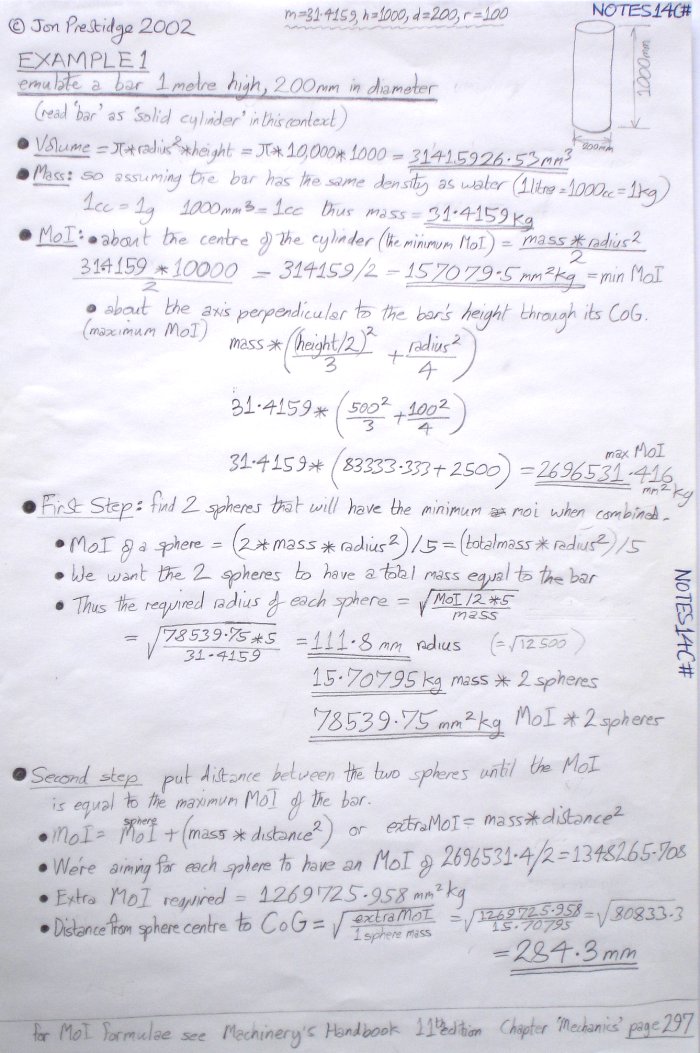
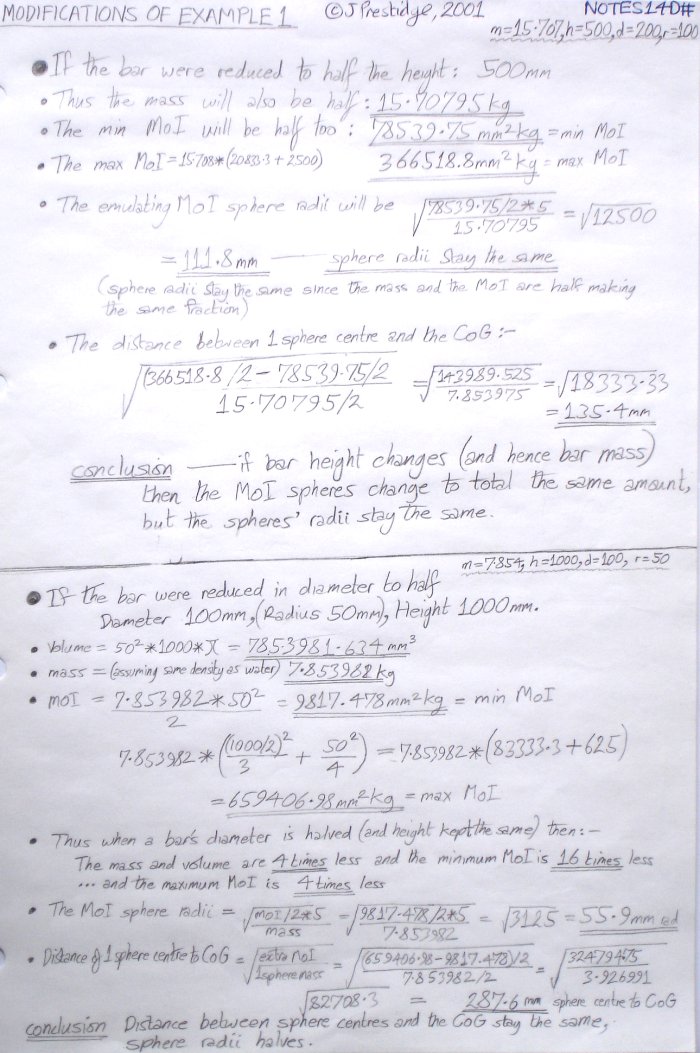
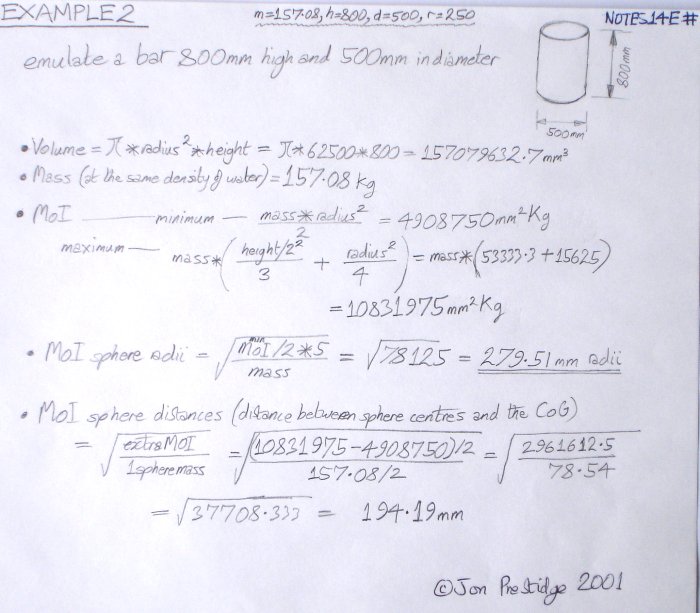
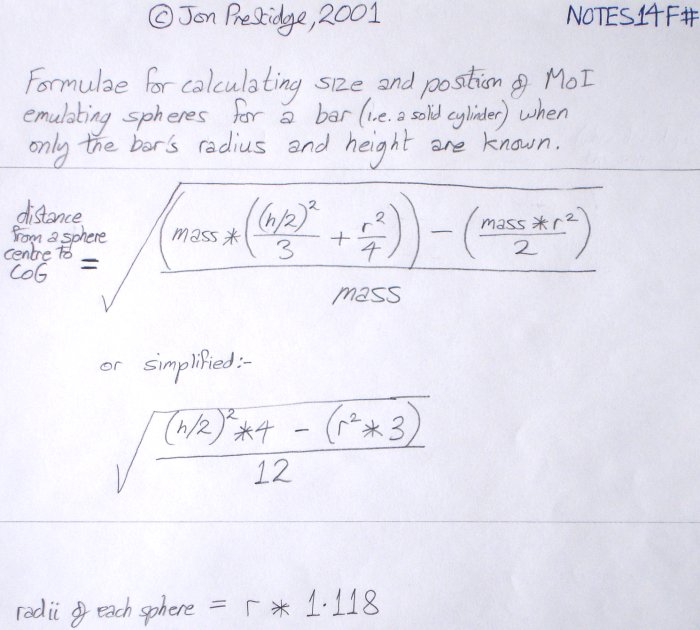
An example formula for calculating the position and size of MoI emulation spheres to emulate the MoI of a solid bar can be seen right at the bottom of the page. you could instead of calculating the positions of MoI sphres, just find their position through trial and error (however I needed to develop a way of calculating things automatically because my human models were morphable to different heights and builds).
(Some example very rough figures for the MoI of a human can be found in NOTES19# which may be useful when experimenting with MoI calculations to see if you're results are in the right ball-park)
An example use of this MoI emulation theory would be to calculate the MoI for a human model that is in the form of a hierarchy of co-ordinate systems and data. First you would set-up MoI emulation spheres for each articulated body part... e.g. upper-arm, forearm, etc. Then store, for each body part (in its own part of the hierachy's data), the MoI of the individual spheres along with their local co-ordinates. Then in the same way you would apply the matrices to local polygon co-ordinates of the body parts to make then into world co-ordinates to supply to the renderer -- do the same to the collision sphere local co-ordinates so that they become world co-ordinates. Then you can use the standard formula for adding together MoI values (that you can find in any engineering text book) for each axis (and axis position) you require the MoI for. You may of course not want the MoI from a world co-ordinates' perspective... in may cases you would want the MoI to be from the perspective of the co-ordinate system of the whole human model -- in which case only transform back to that level (and not the extra step to world level).